10月19日上午,清华大学展示两项无障碍领域科技创新成果。清华大学未来实验室主任、美术学院徐迎庆教授代表团队介绍了“大幅面触觉图形显示终端”,可以让盲人通过触摸感知丰富的图像,该成果由鲁晓波教授、史元春教授和徐迎庆教授共同发起并历经数年完成;机械学院季林红教授代表团队介绍了“下肢截瘫助行机器人”等科研成果,可以让截瘫患者在机器辅助下站立行走。这些成果未来的产业化,将对改善相关人群的感知与行动能力起到巨大帮助。
让盲人感知图像
由清华大学自主研发的“大幅面触觉图形显示终端”与传统的计算机屏幕不同,它的表面由可以凸起和收回的点阵组成,通过计算机控制这些点阵的变化,可以把传统的图片变成可以触摸的图形。盲人用户通过触摸它们来阅读文字和认知图片。

大幅面触觉图形显示终端演示
该设备也进一步推动了针对盲人用户的无障碍应用的发展,例如:电子盲文图书的普及、盲人用户上网学习、购物和浏览,并且使得盲人能够更加便利地学习数学几何、物理电路、化学结构等图形化知识。

徐迎庆团队和显示终端产品
该设备原型采用了团队自主设计并研发的自锁机械结构,来驱动触觉图像的渲染,具有低成本、可扩展、大幅面等优点。同时,该设备采用了基于图像语义的分时渲染算法和创新的触觉引导机构,可以帮助盲人用户更准确地认知和理解图像。
针对盲人用户的特殊需求,研发团队设计了多通道融合的交互体验。不仅提供了触觉交互功能,还设计了基于位置的三维声音导航和语音交互功能。用户体验设计方面,团队在遵循盲人使用电子设备习惯的同时,最大限度地发挥触觉点阵显示的交互优势。此外,该产品原型还配置了触听觉控制的基础模块,具有高度的应用可扩展性,可以支持大部分网页和应用的基本操作。

徐迎庆讲解显示终端
“触觉是盲人在学习和认知图形、图像信息时最主要的方式之一。”未来,徐迎庆团队将继续优化产品,促进显示终端批量化生产;通过多方合作,开发更多的产品应用,以满足盲人的日常生活需求。
“我们希望通过共同的努力使盲人朋友能更多地和外界接触,让他们也可以像普通人一样平等便捷地获取信息。”徐迎庆说。
让截瘫站立行走
季林红团队研发的“下肢截瘫助行机器人”——无动力储能外骨骼(ES-EXO)是一款帮助截瘫患者实现站立和行走的助行产品。但是ES-EXO的设计跳出了现有助行产品的理念,除了能帮助截瘫患者更加省力地行走,还能促进他们身体机能的恢复和提升。

助行机器人模型
清华团队自主研发的ES-EXO,能将使用者上肢和躯干的肌肉产生的能量传递到下肢,代偿下肢运动功能受损的肌肉,达到使用者和外骨骼同时运动的效果。
通过骨盆模块化设计和髋关节储能设计,ES-EXO还可根据使用者身高、体重和损伤情况设置参数。在髋关节伸展过程中,患者重心降低和髋关节屈肌被动拉伸都会产生能量。ES-EXO能最大程度储存这些能量,并在髋关节屈曲过程中释放,为行走时下肢的摆动提供助力,降低使用者能量消耗,减缓上肢和躯干肌肉疲劳速度。
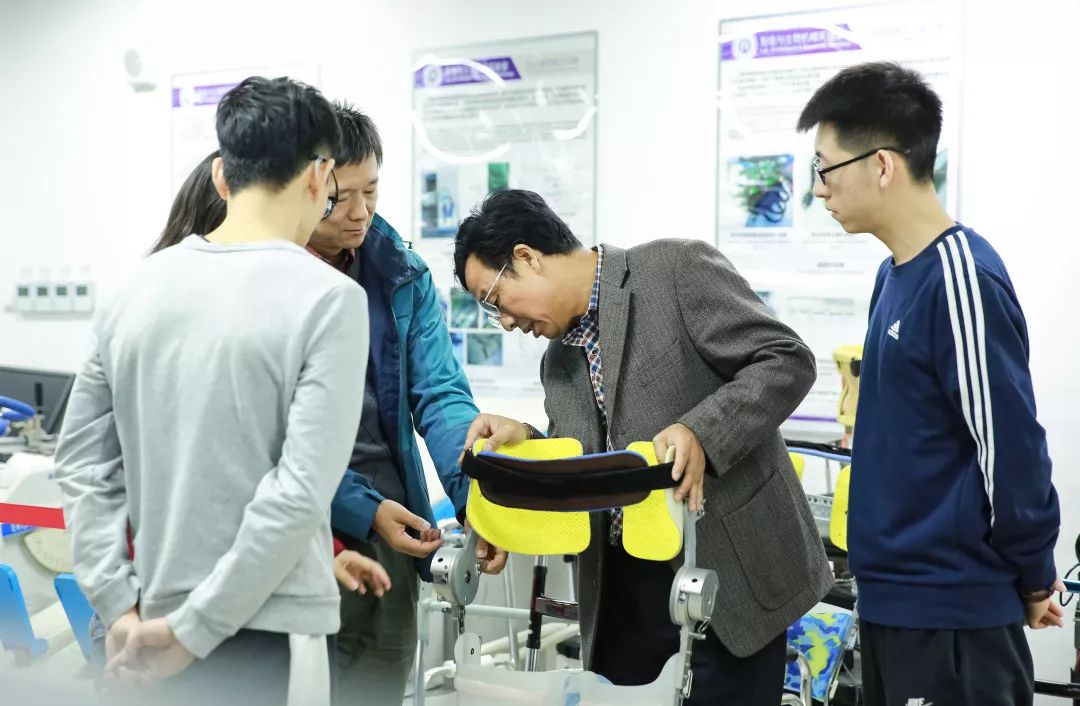
季林红讲解ES-EXO结构设计
据统计,我国脊髓损伤患者数量已达到130万,并且以每年12-15万的速度增长,其中工人和农民患者占患者总数的66.08%,损伤后高额的治疗和康复费用负担过重。
季林红介绍,相比已经商业化的外骨骼,ES-EXO的价格更具优势,广大截瘫患者能够接受并负担得起。未来,ES-EXO将广泛应用于康复机构、医院、社区以及家庭,以帮助患者提高生活质量,树立自信心。

季林红讲解ES-EXO结构设计
此外,季林红团队还根据神经可塑性理论以及人机交互机器人技术成功研发上肢康复辅助机器人。
此款机器人汇集了康复训练、功能评估以及智能康复处方技术,可以辅助因神经损伤(如脑卒中、脑外伤等)造成上肢运动功能障碍的患者进行康复训练。它不仅安全可靠,更加具有趣味性和个性化,还能通过先进的脑控训练模式,建立运动意图与感觉反馈闭环,真实模拟健康人的运动控制功能,充分刺激神经闭环,提高患者的康复训练效率。